Motor-driven
Electric Scooter

Key parameters
| Item | Parameters |
|---|---|
| Motor type | Hub motor Mid-drive motor |
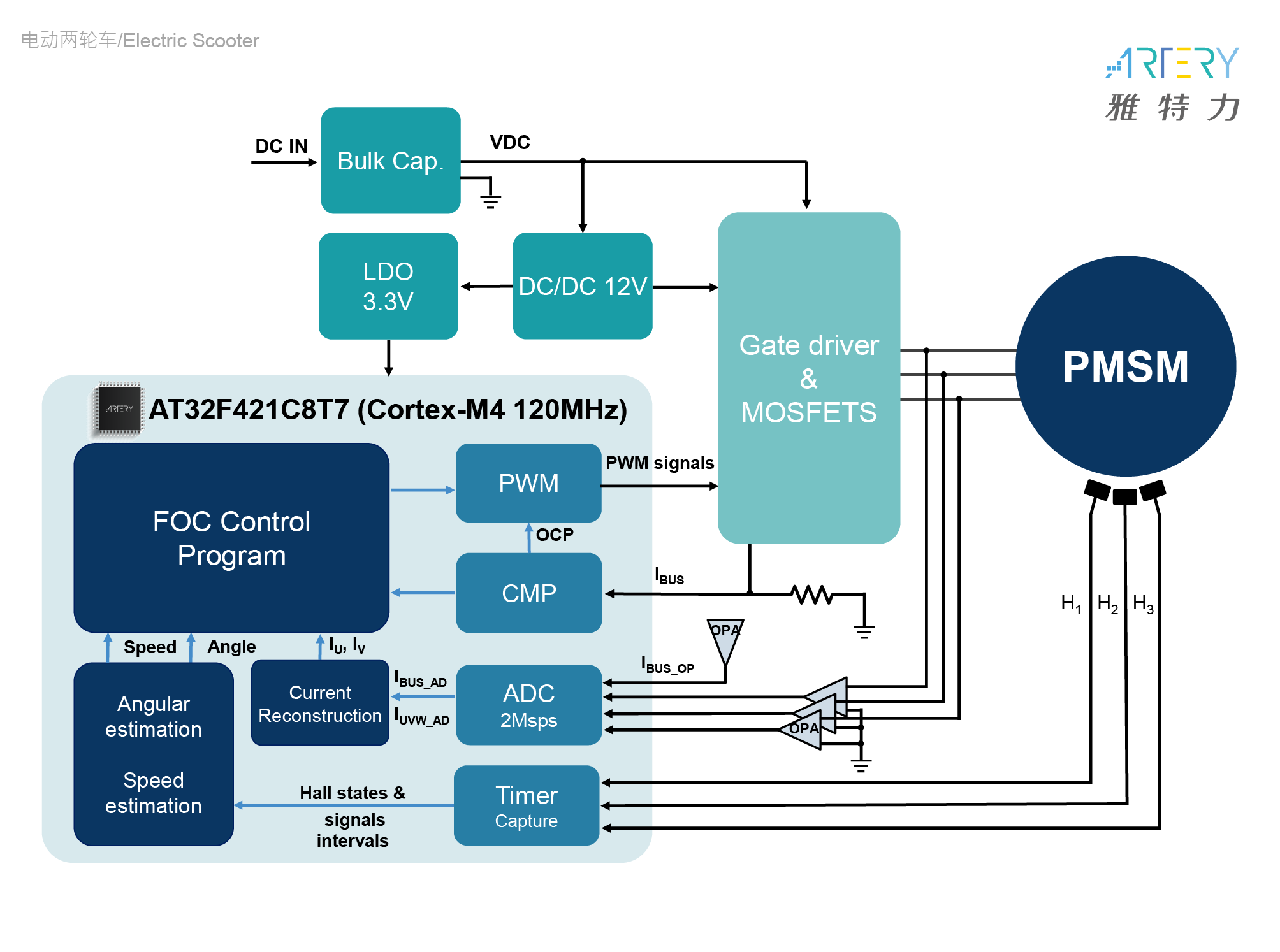
| Control method | Sensored/Sensorless FOC vector control |
| Current sampling | 1-shunt/low-side MOS sampling |
| Angular estimation | Hall sensor self-learning and self-correction |
| Regenerative braking current | Adjustable breaking force |
| Battery current control | Battery output current control and adaptive charging current control |
| Protection mechanism | Stall, overcurrent, overvoltag and undervoltage protection |
Block diagram